L298N
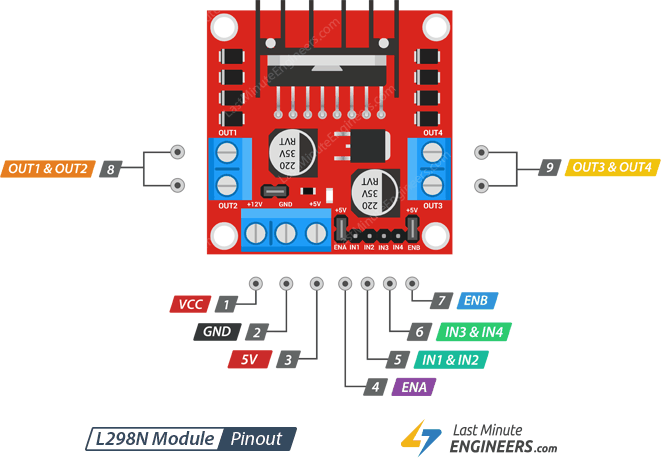
L298N是一种常用的直流电机驱动模块。PIN脚如下图:
L298N可以分别单独控制两路直流电机。
- IN1,IN2控制电机A
- IN3,IN4控制电机B
以电机A为例,控制方式如下表:
| IN1 | IN2 | 旋转方式 |
|---|---|---|
| 高 | 低 | 正转 |
| 低 | 高 | 反转 |
| 高 | 高 | 停止 |
| 低 | 低 | 停止 |
简单来说,IN1,IN2一高一低时电机转动,两者同时为高或同时为低时电机停止转动。
L298N 驱动板引脚说明
- VCC +12V 引脚,为电机供电电源。输入电压可以在5~35V之间。请记住,如果 5V-EN 跳线已就位,则需要提供比电机实际电压要求多 2 伏的电压,以便获得电机的最大速度。
- GND 引脚,公共接地引脚。
- 5V 引脚,为L298N IC内部电路供电。
- OUT1 & OUT2引脚,连接到电机 A。
- OUT3 & OUT4引脚,连接到电机 B。
- IN1 & IN2引脚,用于控制电机A的旋转方向。当其中一个是高电平而另一个为低电平时,电机A将旋转。如果两个输入都为高电平或低电平,则电机 A 将停止。
- IN3 & IN4引脚,用于控制电机B的旋转方向。当其中一个是高电平而另一个为低电平时,电机B将旋转。如果两个输入都为高电平或低电平,则电机B将停止。
- ENA 引脚,用于控制电机A的速度,将此引脚拉至高电平(保持跳线到位)将使电机A旋转,将其拉低会使电机停止。卸下跳线帽并将此引脚连接到PWM输入将使我们能够控制电机A的速度。
- ENB 引脚,用于控制电机B的速度,将此引脚拉至高电平(保持跳线到位)将使电机B旋转,将其拉低会使电机停止。卸下跳线帽并将此引脚连接到PWM输入将使我们能够控制电机B的速度。
另外,模块上还有三个跳线帽:
- 5V EN
- 5V - EN A,将EN A接到5V
- 5V - EN B,将EN B接到5V
5V EN跳线帽
这里比较难理解的是5V EN跳线帽。L298N 驱动板的原理图如下:
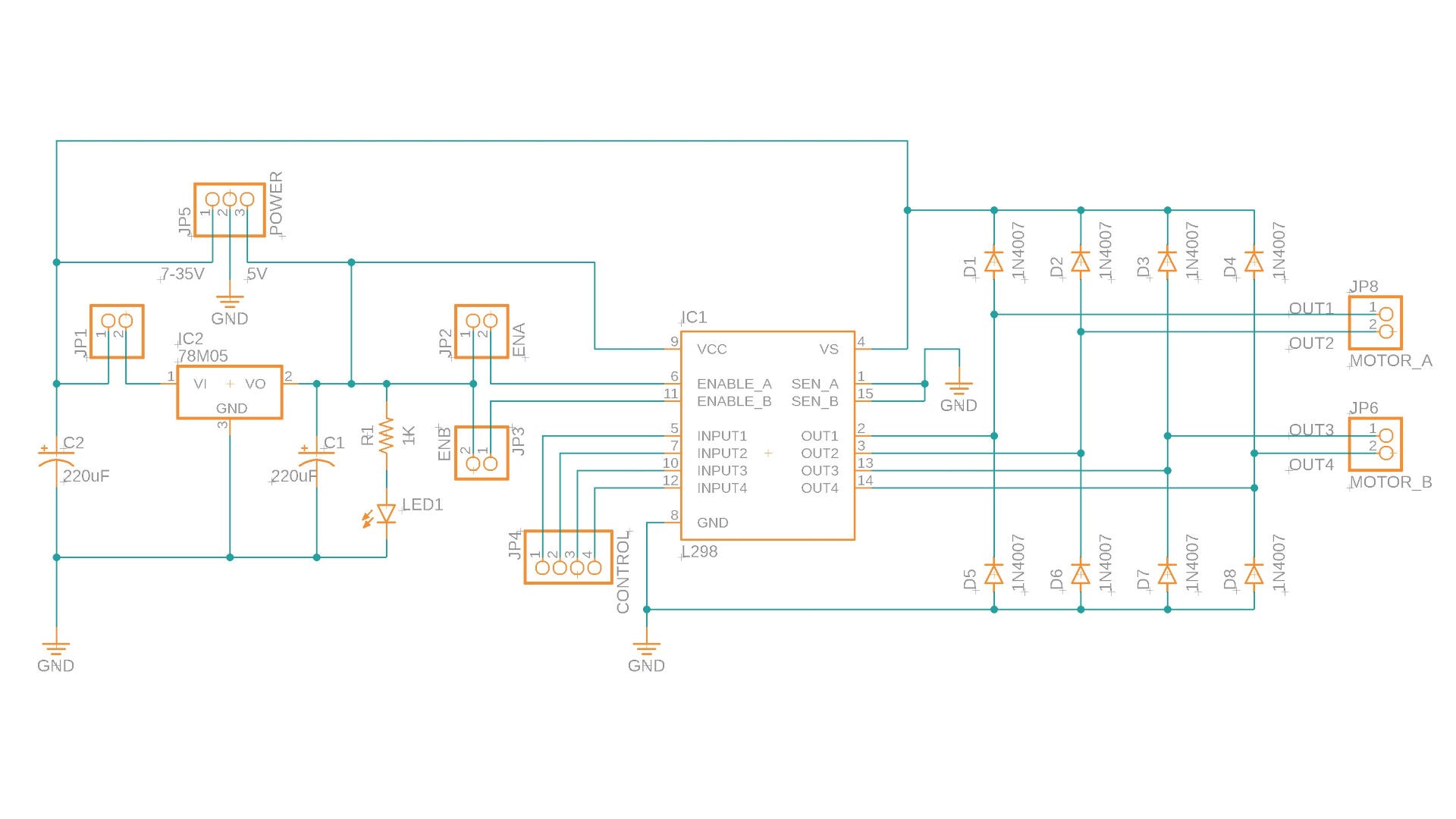
L298N IC的工作电压为5V,所以我们必须提供5V的电压给芯片。而模块上有一个稳压器芯片L78M05,它可以将高电压转换为5V电压。5V EN跳线帽是图中的JP1,可以看出,它是给L78M05稳压芯片输入电压,如果断开L78M没有电压输入,不工作;接上跳线帽则L78M被供电,它提供5V输出,既可以给L298提供5V电源,也可以给外部其他电路提供5V电源。
Note
L78M05的压降为2V,意味着如果要得到5V的输出电压,输入电压必须大于7V。
L78M05的最大输入电压为35V,如果电机驱动电压大于35V,则不要使用这个稳压芯片来提供5V,要将跳线帽取掉,将稳压芯片的供电断掉。从其他途径给模块芯片供电。
因此和Arduino开发板连接时有多种供电配合方式。
用 L298N 给 Arduino 供电
用 Arduino 给 L298N 供电
如果Arduino在调试,接的是电脑USB的5V电压,这时候给电机的电压只有3V,可能驱动不了电机,使电机无法转动。
Arduino 和 L298N 单独供电
不论哪种情况,Arduino 的地需和 L298N 的地相连。
Danger
另外,如果跳线帽接上了,再不要将驱动板的5V与外部电源输入的5V相连了,不知道谁会烧了谁。
示例代码
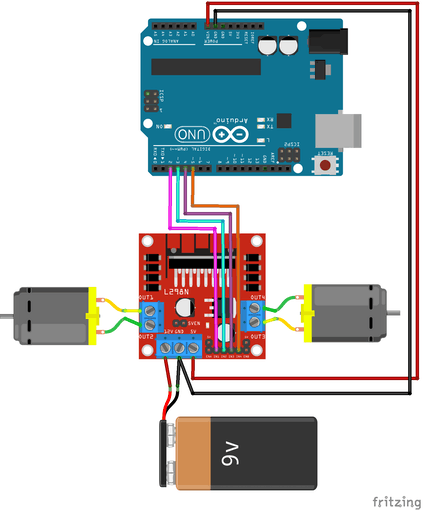
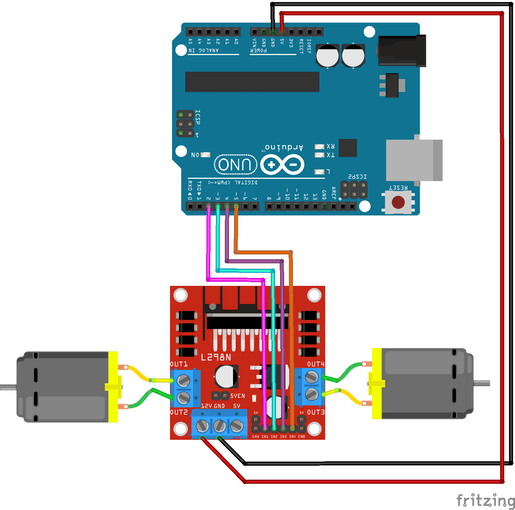
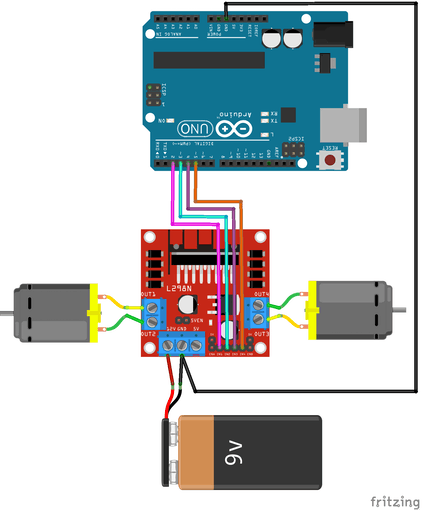
这里采用 Arduino 给 L298N 供电为例,接线图如下:
int motor1pin1 = 2;
int motor1pin2 = 3;
int motor2pin1 = 4;
int motor2pin2 = 5;
void setup() {
// put your setup code here, to run once:
pinMode(motor1pin1, OUTPUT);
pinMode(motor1pin2, OUTPUT);
pinMode(motor2pin1, OUTPUT);
pinMode(motor2pin2, OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
digitalWrite(motor1pin1, HIGH);
digitalWrite(motor1pin2, LOW);
digitalWrite(motor2pin1, HIGH);
digitalWrite(motor2pin2, LOW);
delay(1000);
digitalWrite(motor1pin1, LOW);
digitalWrite(motor1pin2, HIGH);
digitalWrite(motor2pin1, LOW);
digitalWrite(motor2pin2, HIGH);
delay(1000);
}
5V - EN A,5V - EN B 跳线帽
直流电机的转速和电压成正比,PWM就是改变占空比改变电压来改变转速。当然我们不能直接通过控制板的PWM输出来驱动电机,所以先将控制板的PWM信号发给L298N驱动板的EN A或EN B,再驱动板去控制供给电机的电压。通过这种方式可以控制电机速度。
如果5V - EN A,5V - EN B 跳线帽接上了,则EN A, EN B的电压始终为5V,意味着供给电机的电压始终为最大值。因此,如果我们不需要控制电机转速,就可以将这两个跳线帽接上,就可以省两根控制信号线。
使用Arduino控制转速只需将EN A 或EN B与Arduino的PWM输出pin相连,代码如下。