ESP32使用双核FreeRTOS和Arduino环境
FreeRTOS是一款实时操作系统。对于单核计算机而言,一次只能执行一个进程。计算机实际上实在多个任务之间进行高速切换,让用户看上去一切像是在同时进行。
任务
任务是实时操作系统的基本模块,它们在自己的上下文中执行,调度程序负责决定单核CPU在某个时刻应该执行哪个任务。我们可以并行运行多个任务。
创建一个任务
-
TaskCode:指向任务函数的指针
-
TaskName:任务的名称
-
StackDepth:任务堆栈大小,以字节数表示。
-
Parameter:指针,指向任务函数所接收的参数
-
Priority:任务的优先级,数字越大优先级越高,默认最大32级(不定,可以自行去库文件修改),不同任务可以有相同优先级,够用的情况下,最大优先级越小越好
-
TaskHandle:返回一个句柄,用于以后进行函数调用(比如要删除某个任务或者修改其优先级)时对任务的引用
该函数会返回pdPass(成功时)或错误代码
任务函数
任务函数就是我们自定义的功能函数,示例:
Note
任务函数不能有任何返回值,即应该定义成void。它们必须不包含return语句。
删除任务
使用TaskDelte(句柄)函数可以删除任务
实例演示
void setup() {
Serial.begin(112500);
delay(1000);
xTaskCreate(
taskOne, /* Task function. */
"TaskOne", /* String with name of task. */
10000, /* Stack size in bytes. */
NULL, /* Parameter passed as input of the task */
1, /* Priority of the task. */
NULL); /* Task handle. */
xTaskCreate(
taskTwo, /* Task function. */
"TaskTwo", /* String with name of task. */
10000, /* Stack size in bytes. */
NULL, /* Parameter passed as input of the task */
1, /* Priority of the task. */
NULL); /* Task handle. */
}
void loop() {
delay(1000);
}
void taskOne( void * parameter )
{
for( int i = 0;i<10;i++ ){
Serial.println("Hello from task 1");
delay(1000);
}
Serial.println("Ending task 1");
vTaskDelete( NULL );
}
void taskTwo( void * parameter)
{
for( int i = 0;i<10;i++ ){
Serial.println("Hello from task 2");
delay(1000);
}
Serial.println("Ending task 2");
vTaskDelete( NULL );
}
指定任务执行的Core
默认情况下Arduino使用的是ESP32的Core1,Core0被用来处理wifi和Ble。
可以使用命令 xPortGetCoreID() 查看当前使用的Core。
#include <Arduino.h>
void setup() {
Serial.begin(115200);
Serial.print("Run on core: ");
Serial.println(xPortGetCoreID());
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
}
下面将讨论如何通过Free RTOS指定ESP32代码运行的Core。目标是在core0中每 0.5 秒闪烁一个 LED,在 core1 中每 1 秒闪烁一个 LED。
定义任务手柄
在 setup() 函数中使用 xTaskCreatePinnedToCore() 函数为 core0 和 core1 创建任务。
xTaskCreatePinnedToCore(Task1code,"Task1",10000,NULL,1,&Task1,0);
xTaskCreatePinnedToCore(Task2code,"Task2",10000,NULL,1,&Task2,1);
此函数有七个参数:
- 第一个参数是将执行任务的函数的名称,例如Task1code或 Task2code。
- 第二个参数是我们将分配给任务的名称,例如 Task1 或 Task2。
- 分配给任务的堆栈大小,例如 10000。
- 任务输入参数。
- 任务的优先级, 0 表示最低优先级。
- 前面定义的任务手柄,例如Task1 或Task 2
- 指定该任务运行的core ID,例如 0 或 1,其中 0 是core 0,1 是core 1
定义任务函数
接下来定义两个任务,分别控制两个LED的闪烁。
void Task1code( void * parameter ){
Serial.print("Task1 running on core ");
Serial.println(xPortGetCoreID());
for(;;){
digitalWrite(led_1, HIGH);
delay(500);
digitalWrite(led_1, LOW);
delay(500);
}
}
void Task3code( void * parameter ){
Serial.print("Task1 running on core ");
Serial.println(xPortGetCoreID());
for(;;){
digitalWrite(led_2, HIGH);
delay(1000);
digitalWrite(led_2, LOW);
delay(1000);
}
}
实践
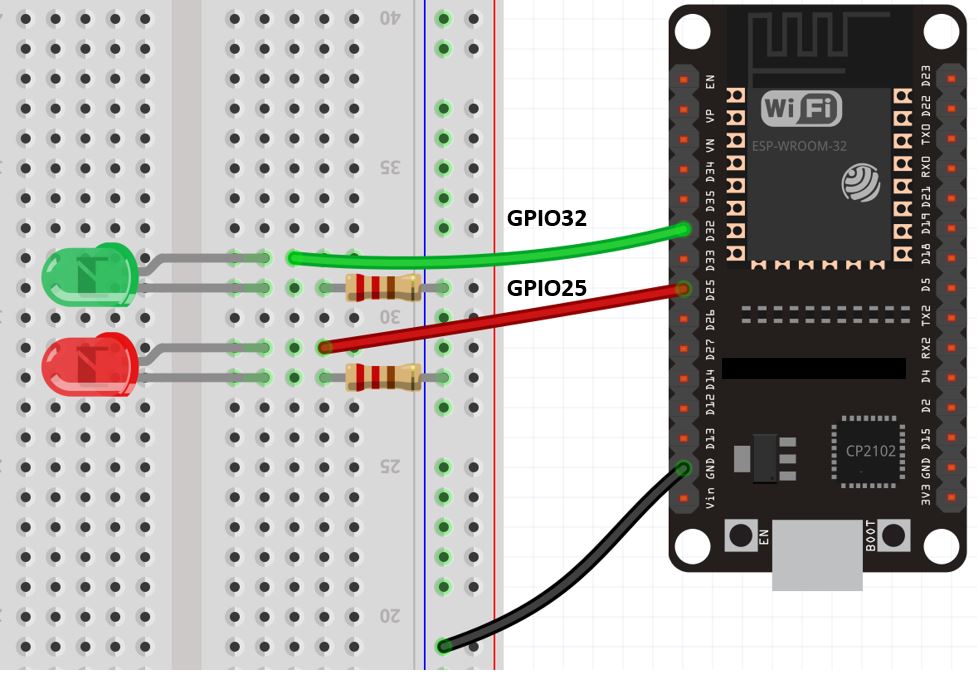
按照如下方式连接两个LED到ESP32开发板。
完整代码
#include <Arduino.h>
TaskHandle_t Task1;
TaskHandle_t Task2;
int led_1 = 32;
int led_2 = 25;
void setup()
{
Serial.begin(115200);
pinMode(led_1, OUTPUT);
pinMode(led_2, OUTPUT);
xTaskCreatePinnedToCore(Task1code, "Task1", 10000, NULL, 1, &Task1, 0);
delay(10);
xTaskCreatePinnedToCore(Task2code, "Task2", 10000, NULL, 1, &Task2, 1);
delay(10);
Serial.print("setup() is run on core: ");
Serial.println(xPortGetCoreID());
// put your setup code here, to run once:
}
void Task1code(void *parameter)
{
Serial.print("Task1 is run on core: ");
Serial.println(xPortGetCoreID());
for (;;)
{
digitalWrite(led_1, HIGH);
delay(500);
digitalWrite(led_1, LOW);
delay(500);
}
}
void Task2code(void *parameter)
{
Serial.print("Task2 is run on core: ");
Serial.println(xPortGetCoreID());
for (;;)
{
digitalWrite(led_2, HIGH);
delay(1000);
digitalWrite(led_2, LOW);
delay(1000);
}
}
void loop()
{
// put your main code here, to run repeatedly:
}